














科技赋能
内部物流自动化
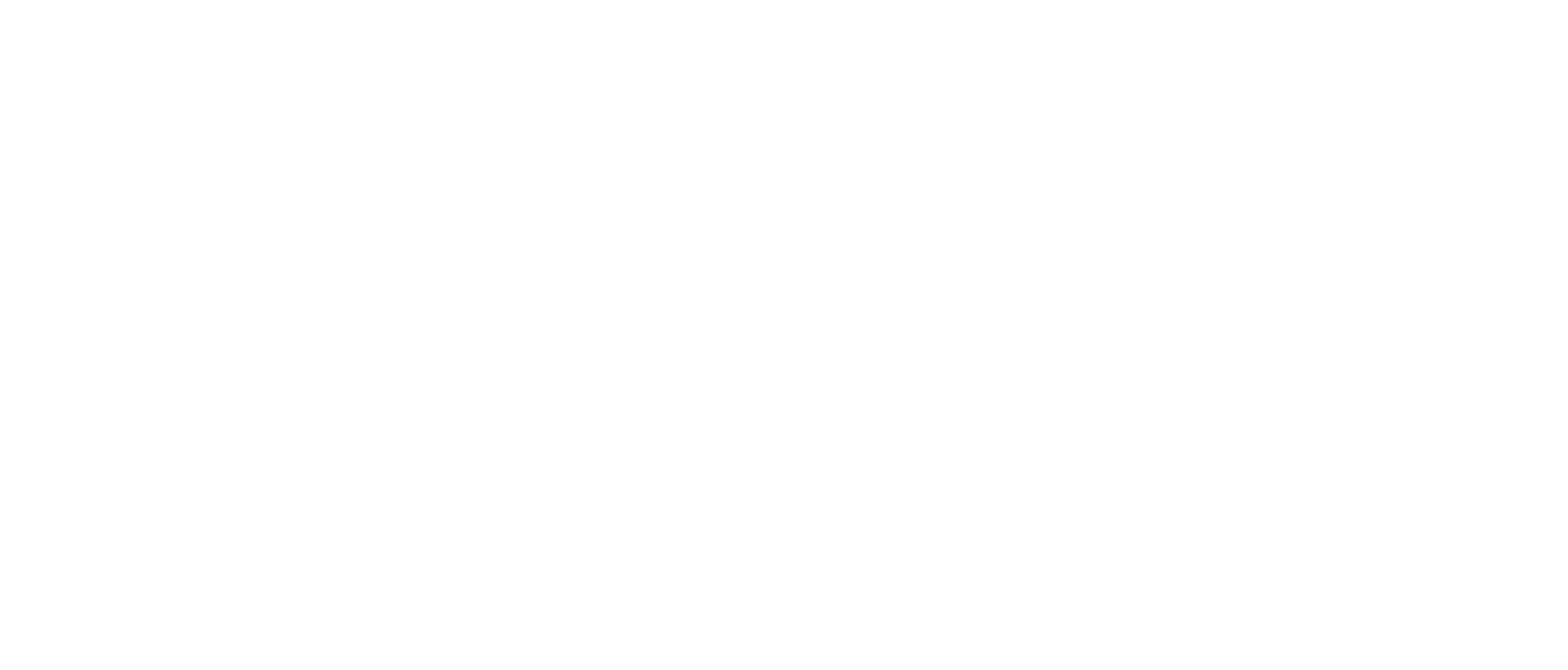
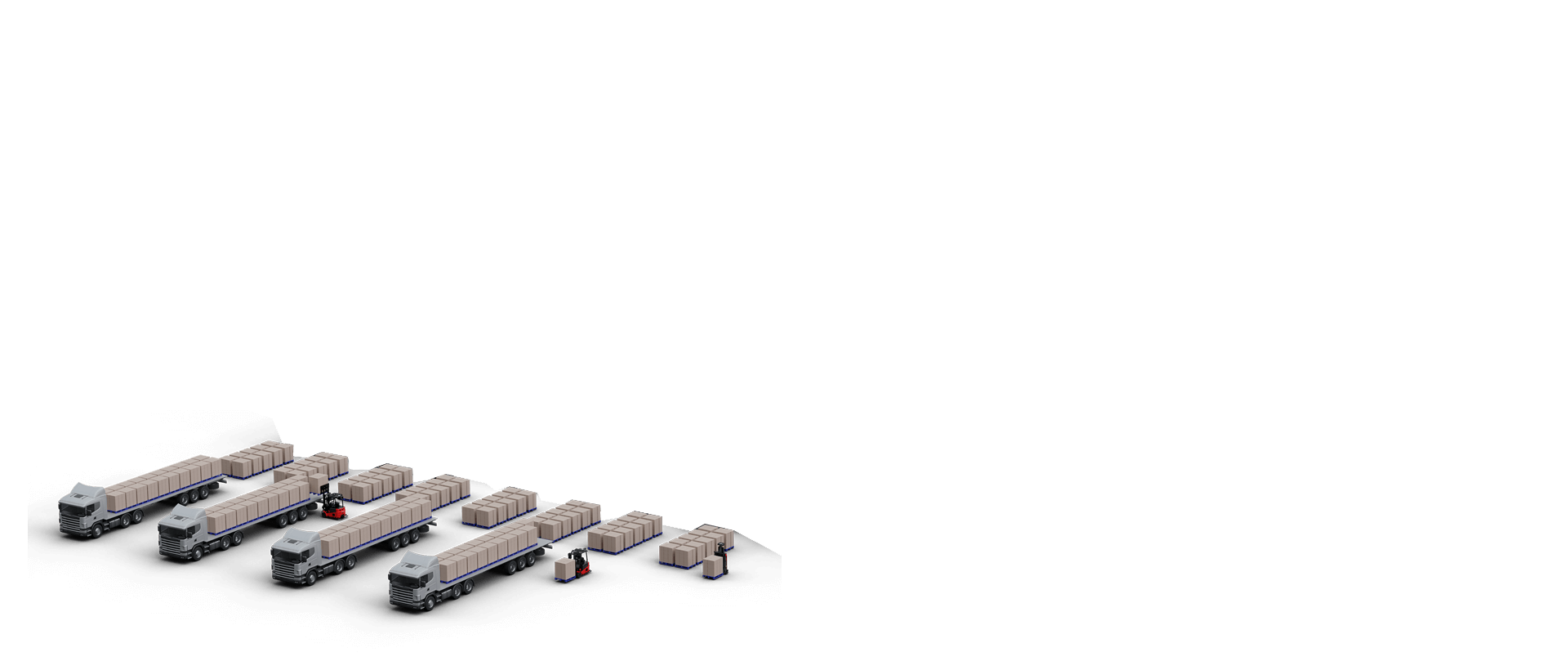
从装卸车到高位存取

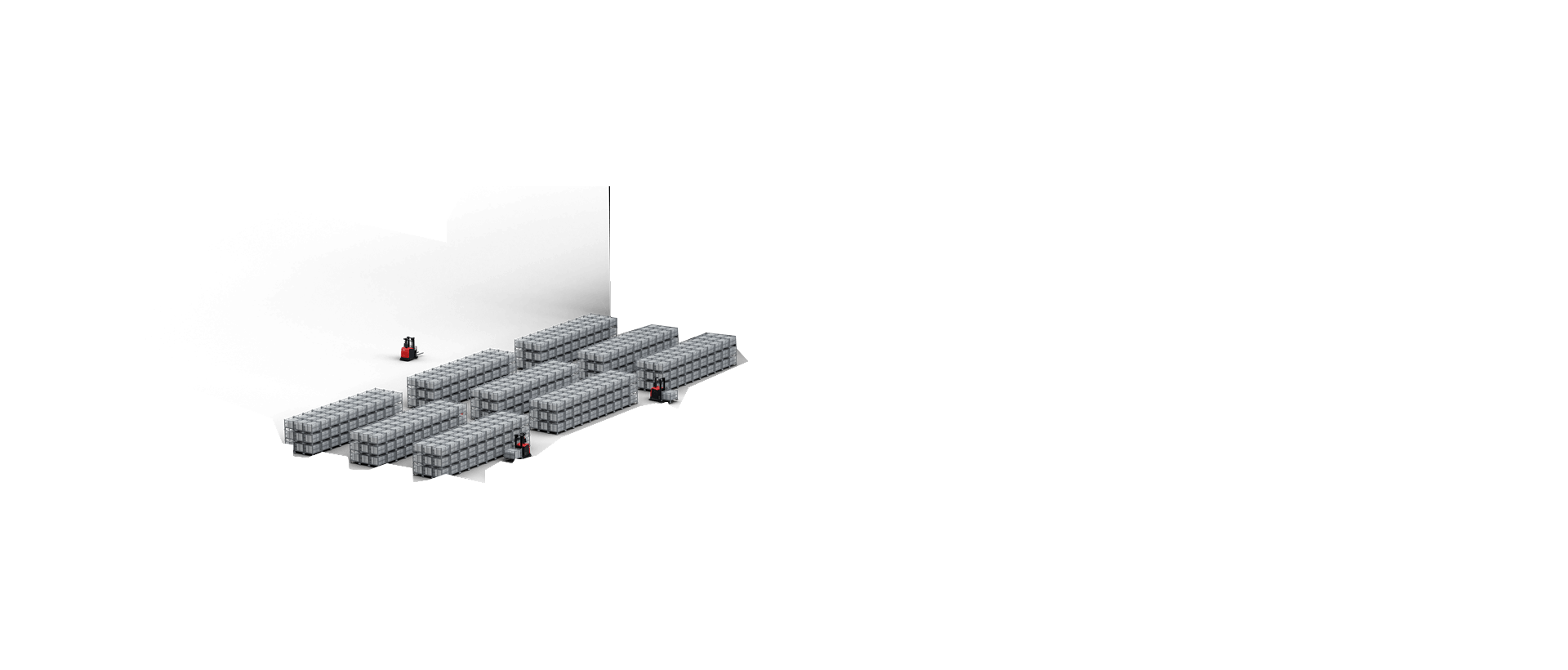

深入研究复杂场景,创造更好的人机协作,提高物流效率和空间利用率,并为客户创造价值。
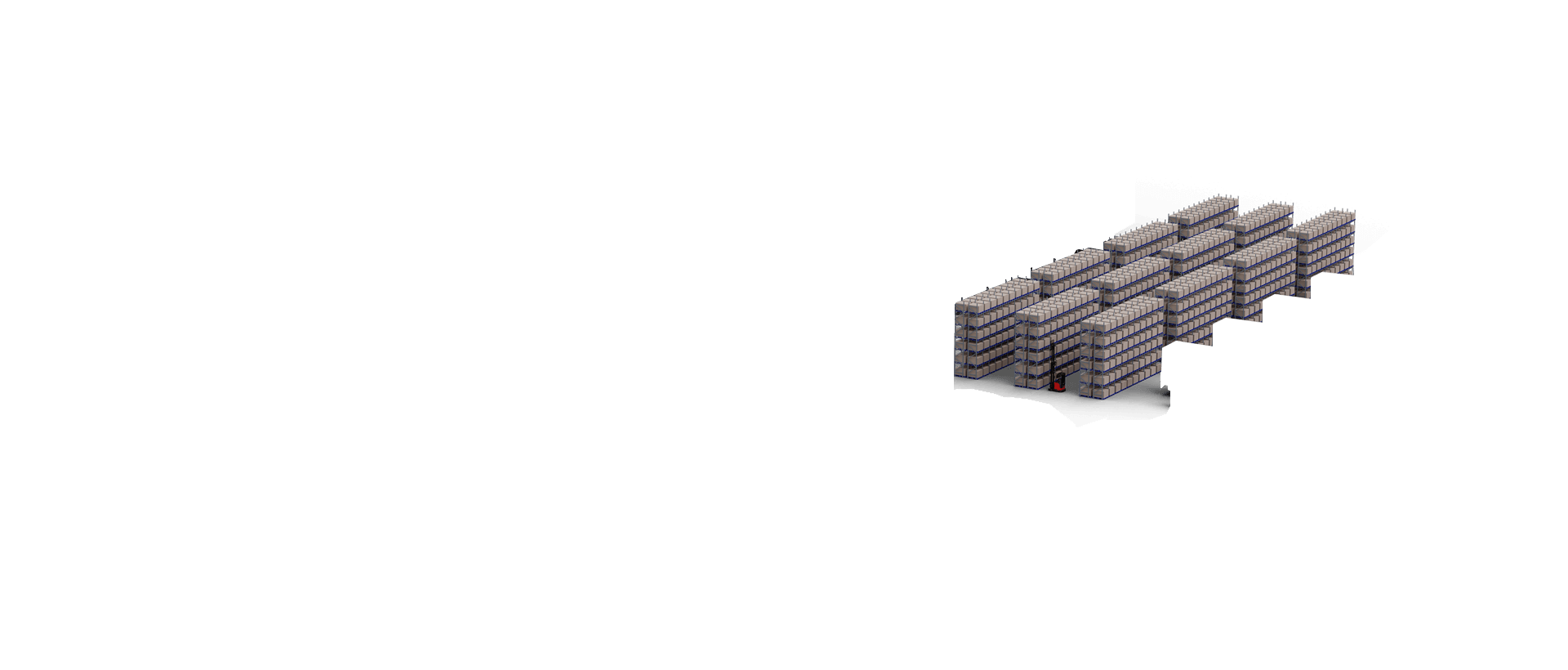
「未来机器人(深圳)有限公司」是全球领先的工业无人车辆及内部物流无人化方案供应商。通过将5G通信、人工智能(AI)、环境感知、深度学习、伺服控制等核心技术应用于工业无人驾驶领域,未来机器人研发了多场景适用的全矩阵无人叉车和无人牵引车产品。未来机器人解决方案覆盖内部物流全栈场景,并突破11.5米高位存取、2.0米窄通道存取、无人装卸车、多层料框堆叠等核心刚需场景应用。目前,未来机器人业务遍及全球30多个国家和地区,在全球累计销售3000+产品,落地450+项目,与50+世界500强企业达成了合作,业务覆盖汽车制造、轮胎、食品、石化、电商、3PL、制药等多个领域。
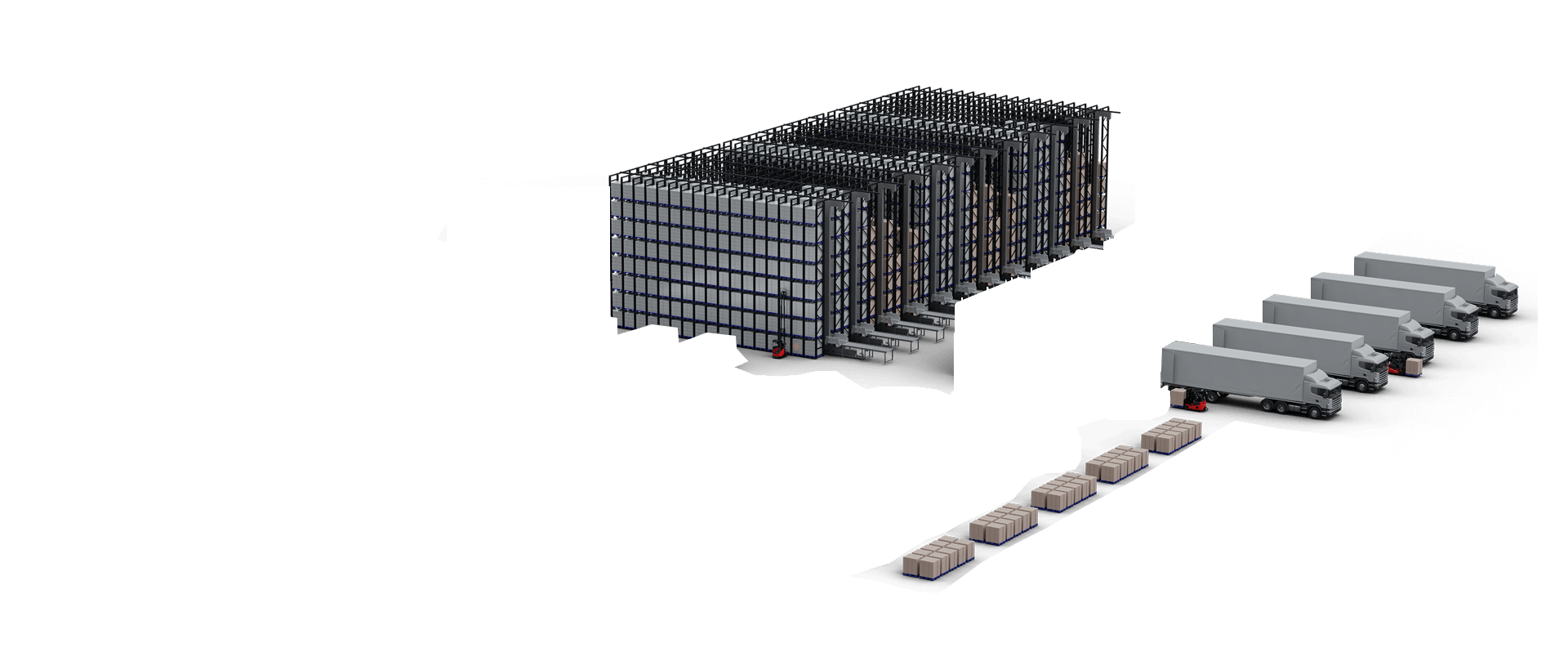
E系列AGV叉车从货车上叉取物料,并将其运送到指定区域。